Accessing On-Board Diagnostics II (OBD-II) data from your car can unlock a wealth of information about your vehicle’s performance and health. For enthusiasts and developers, tools like Carloop bridge the gap between your car’s CAN bus and microcontrollers, enabling custom projects and deeper insights. Initially, getting this connection working can present challenges, but with a few key adjustments, successful OBD-II data retrieval is achievable. This guide outlines the steps taken to overcome initial hurdles in receiving OBD-II data using Carloop, offering a practical approach for anyone facing similar issues.
Initial Challenges in OBD-II Data Retrieval
When first attempting to interface with a vehicle’s CAN bus to extract OBD-II data, it’s common to encounter difficulties in establishing a reliable data stream. The Controller Area Network (CAN bus) is the backbone of modern automotive communication, and OBD-II is the standard protocol used for diagnostics and data reporting. Successfully tapping into this system requires precise configuration and code implementation. Early attempts might yield no response, leaving you wondering where the problem lies.
One user experienced this firsthand when trying to read OBD-II data. Despite setting up their Carloop device and attempting to communicate with the CAN bus, they initially received no data. This frustrating situation is often due to subtle errors in library inclusion, initialization, or data transmission methods. The key to resolving these issues lies in meticulous review and adjustment of the code, ensuring compatibility with the Carloop hardware and the OBD-II protocol.
Key Adjustments for Successful OBD-II Data Acquisition with Carloop
To overcome the initial lack of response, a series of targeted code modifications proved effective. These changes, focusing on leveraging the Carloop library correctly and adjusting CAN bus communication parameters, were instrumental in establishing a working OBD-II data connection. Here’s a breakdown of the successful adjustments:
-
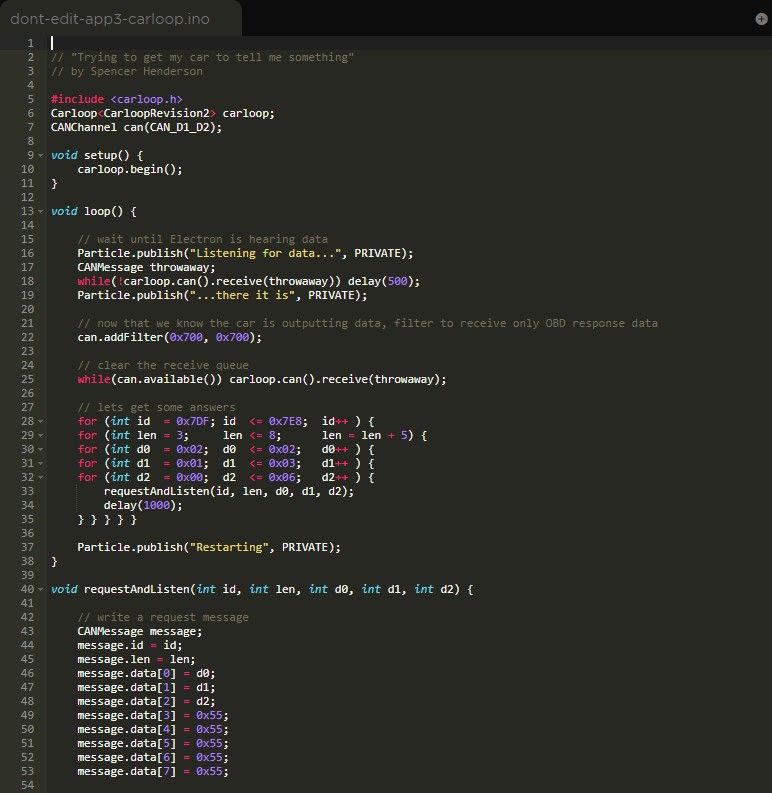
Include the Carloop Library: The first crucial step is to ensure the Carloop library is properly included in your project. This library provides the necessary functions and definitions to interact with the Carloop hardware. Add the line
#include <Carloop.h>at the beginning of your code. This inclusion makes the Carloop-specific functions available for use. -
Specify Carloop Revision: For Carloop to function correctly, the microcontroller needs to know which revision of the Carloop hardware is connected. This is achieved by adding the line
Carloop<carlooprevision2> carloop;(or the appropriate revision number) at the top of your program. This initialization step is vital as it configures the software interface to match the hardware capabilities of your Carloop device. -
Initialize Carloop: Replace the standard CAN bus initialization
can.begin(500000);withcarloop.begin();. Thecarloop.begin()function not only initializes the CAN bus interface but also sets it up specifically for the Carloop environment. Crucially, as noted in Carloop examples,carloop.begin()defaults to a CAN bus speed of 500000 bits/sec, which is a common and often necessary speed for OBD-II communication. -
Utilize Carloop CAN Functions: Modify all instances of standard CAN bus receive and transmit functions to use the Carloop-specific versions. Replace
can.receive(message)withcarloop.can().receive(message)andcan.transmit(message)withcarloop.can().transmit(message). This ensures that the CAN bus communication is handled through the Carloop library, taking into account any hardware-level abstractions or specific requirements of the Carloop interface. -
Padding Data in Messages: An intriguing observation during testing was the impact of message length. It was found that messages with a length of 3 bytes (
message.len=3;) did not elicit a response from the CAN bus, while changing the message length to 8 bytes (message.len=8;) resulted in successful communication. To address this, the following lines were added to pad the data field of the CAN message:message.data[3] = 0x55; message.data[4] = 0x55; message.data[5] = 0x55; message.data[6] = 0x55; message.data[7] = 0x55;This padding with arbitrary data (0x55 in this case) to fill the 8-byte message frame seemed to be a key factor in establishing communication. The exact reason for this behavior might require deeper investigation into the Carloop library or specific vehicle CAN bus implementation, but empirically, it proved necessary for successful data retrieval in this scenario.
By implementing these seven modifications, the user successfully started receiving OBD-II responses from their car’s CAN bus.
Message Length and CAN Bus Communication
The discovery that message length played a crucial role in receiving responses highlights the intricacies of CAN bus communication and potentially the specific requirements of the vehicle’s OBD-II implementation or the Carloop interface. While the CAN bus protocol itself supports variable data lengths from 0 to 8 bytes, certain systems or interfaces might have specific expectations or limitations.
In this case, the vehicle or the Carloop interaction might have required a full 8-byte CAN frame, even if the actual data payload was smaller. Padding the message to 8 bytes could ensure proper message formatting or address some underlying timing or buffering issue. Further investigation, perhaps using CAN bus analysis tools, could reveal the precise reason behind this behavior. However, from a practical standpoint, understanding and adapting to these specific requirements is essential for successful OBD-II data access.
Conclusion: Practical OBD-II Data Access with Carloop
Successfully accessing OBD-II data through a car’s CAN bus using tools like Carloop requires a blend of correct hardware setup and precise software configuration. While initial attempts may be met with silence, systematically reviewing and adjusting key aspects of the code, particularly library inclusion, initialization, CAN function calls, and even message formatting details like length, can lead to a breakthrough.
The experience outlined here underscores the importance of:
- Library Correctness: Utilizing the correct libraries and ensuring they are properly included and initialized is fundamental.
- Hardware-Software Compatibility: Understanding the specific requirements and nuances of the hardware interface (like Carloop) and aligning the software accordingly is crucial.
- Empirical Testing: Experimentation and observation, such as testing different message lengths, can uncover unexpected but critical factors in establishing communication.
By following these steps and adopting a methodical approach to troubleshooting, enthusiasts and developers can successfully tap into the rich data stream available through their vehicle’s OBD-II port, opening up a world of possibilities for custom automotive projects and deeper vehicle understanding. For those seeking a broader understanding of OBD-II, resources like Wikipedia’s OBD-II article provide comprehensive background information on the standards and protocols involved.